ZY-AI18 ����һ�廯�ۺ�ʵѵ�����豸
һ��ϵͳ����
��װ�Զ��������߽��ܽ�ϡ��й�����2025���͡������г����˲ŷ�չ�滮��Ҫ���ԡ��������족�;�����ᷢչ�ص��������ȱר���˲ż������ͿƼ��˲ŵ�����Ҫ�����ݹ������ְҵ����������������������й���ǰ����ҵ�ĸ�λ���ӹ����缼�ܾ�����Worldskills����ر�����̿�����ƶ��ɡ�����ϵͳ�ԡ�����վ��(Working Station����ʽ�ۺ����ֻ���һ�廯�Զ���������ҵ�������Զ�����������Ԫ��������������������ʩ�������߿�����ѧϰ������ѵ���Զ���רҵ���ܡ��������Զ������ܡ����缶����Ҫ��ȣ�ͬʱҲ�������ְҵ�����е���������뷽��������
�豸�ɹ�װ���Ϲ���վ���Ӹ�š�ǹ���վ�����ּ���վ����ҵ�����˰�װ����վ����Ʒ�Զ�����վ��ɣ�����������װ������ϵͳ���Զ���װϵͳ���Զ�������ֿ⼰�������ϵͳ���Զ�������������ϵͳ�������������ݲɼ�������ϵͳ�ȣ���һ�����������ܹ���ģ��װ�ã�Ӧ���˹�ҵ�����˼�����PLC���Ƽ������������Ƽ������ŷ����Ƽ�������ҵ������������������������ȹ�ҵ�Զ�����ؼ�������ʵ�ֿ�ƿ�Զ����ϡ��������϶������ϡ������Զ��ּ𡢿�����ѡ��װ���Զ��Ӹǡ��Զ�š�ǡ���Ʒ��⡢��Ʒ�ּ𡢻�����ץȡ��С��иǰ�װ���Զ�������������ȫ���̡�
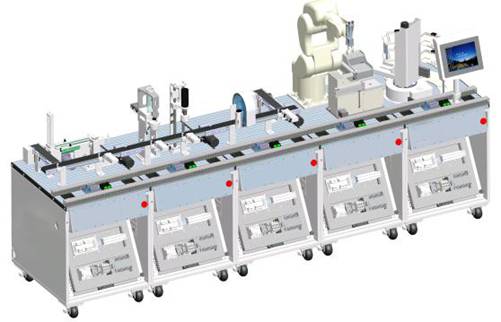
���豸�ο�ͼƬ��
������������
ϵͳ��Դ�� 220V
�豸������360kg
���ѹ��AC220V ��5%
����ʣ�3.6KW
����ʪ�ȣ���90%?
�豸�ߴ磺420cm��72cm��150cm(����������)
��ȫ�������ܣ���ͣ��ť��©�籣��������������
PLC:������S7-1200
�ŷ���������V90/���SIMOTICS S-1FL6
��������MT8101IE+MT-FX3M
���������������SR2/���AM17HD6426-06N
�����ˣ�����RS05N(������Ʒ��)
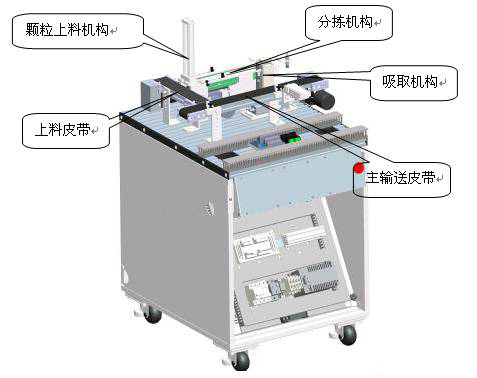
�������Ϲ���վ
3.1����վ����
����Ƥ���������ƿ���͵�������Ƥ����ͬʱ�������ϻ�������Ͳ�ڵ������Ƴ��������ּ�����Կ������ϸ�����ɫ���зּ𣻵���ƿ������װλ��Ƥ��ֹͣ����λ�н���������ƿ�̶�����ȡ�������ּ�λ�Ŀ���������ȡ�ŵ���ƿ�ڣ�ƿ�������ϵ����趨�Ŀ���������λ�н������ɿ���Ƥ����������ƿ�����͵���һ����λ���˵�Ԫ�����趨����������װ��ʽ���ɴ�������ɫ��2�֣����������������4�������в�ͬ����ϣ�����8����װ��ʽ��
3.2��Ҫ��������
��CPU��1214C DCDCDC����Ʒ�������ӣ�14 �㼯�� 24 V ֱ�����������룬10 �㼯�������������2 �㼯��ģ�������룬0 �� 10 V��2 ��������� (PTO)��Ƶ�ʸߴ� 100 kHz��������ȵ������ (PWM)��Ƶ�ʸߴ� 100 kHz��������̫���ӿڣ�TCP/IP native��ISO-on-TCP��������ģ���Ͼ�Ϊ�ɲ�ж�Ķ��ӡ�
��ֱ�����ٵ����Z2D1024GN-18S-2GN75K����24VDC�����ٱ�1/75��1800Rpm��0.45Kg.cm��0.69A��GN�������͡�
����ת���ף�HRQ10����Ʒ���ǵ¿ͣ�˫�������ֳ���ʽ�����ͣ���10����ת�Ƕȷ�Χ0-190�㣻�ظ�����0.2�㣻����1.1Nm���ӹܿھ�M4*0.8����ѹ���塣
����˷Ŵ�����FS-N11P��:Ʒ�ƻ���ʿ��PNP�����VR���ڣ���/��������Ӧʱ��1ms���£�12-24VDC���磻��ɫLED��Դ���������³���2m���ߴ�15*39*73mm��
�����ͷ��FU-25����Ʒ�ƻ���ʿ����ɢ�����ͣ������Σ�M6������ͼ0.005 560 100������2 m ���ɲ��У������ڶ�λ M8 (Լ 18 g)
�����ͷ��FU-35FZ����Ʒ�ƻ���ʿ����ɢ�����ͣ������Σ�M3������ͼ���о�ͷ0.005 200 32������ǿ������1 m�����ɲ���M3, ������ F-2HAʹ�ù��ֱ�� 0.4(Լ 6 g)
�ص�Դ��EDR-150-24V�����������24VDC���150W/6.2A��
���·����EA9AN2C10A��:2�����10A��C���ѿ����ԡ�
���Ӧ���أ�����ʽ���нӵ�Żɹ��ͣ������ͣ��߳�2m��5-30VDC���磻��ɫLEDָʾ�����÷�ΧG�ͣ�����MD��MK��TR��TC��ACP��ACQ��STM��TWH��M����TWQ��SDA���ף�
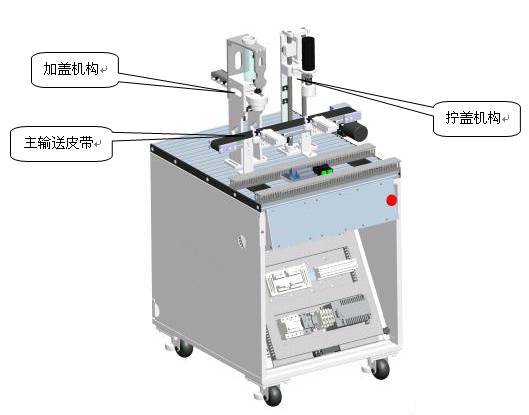
�ġ��Ӹ�š�ǹ���վ
4.1����վ����
������һ����վ��װ�ÿ�����ƿ�ӣ���ƿ�ӱ����͵��Ӹǻ�����������Ƥ��ֹͣ���иǶ�λ�н�������ƿ�ӹ̶����Ӹǻ��������Ӹ����̣������Ӽӵ�ƿ���ϣ��Ӻø��Ӻ�������Ƥ�����������ϸ��ӵ�ƿ�Ӽ���������š�ǻ�������š�ǻ����·���������Ƥ��ֹͣ��š�Ƕ�λ�н�������ƿ�ӹ̶���š�ǻ�����������ƿ��š����������Ƥ����������š�ø��ӵ�����ƿ���͵���һ��λ��ƿ�Ƿ�Ϊ��ɫ�ͺ�ɫ���֡�
4.2��Ҫ��������
��CPU��1214C DCDCDC����Ʒ�������ӣ�14 �㼯�� 24 V ֱ�����������룬10 �㼯�������������2 �㼯��ģ�������룬0 �� 10 V��2 ��������� (PTO)��Ƶ�ʸߴ� 100 kHz��������ȵ������ (PWM)��Ƶ�ʸߴ� 100 kHz��������̫���ӿڣ�TCP/IP native��ISO-on-TCP��������ģ���Ͼ�Ϊ�ɲ�ж�Ķ��ӡ�
��CPU��չ��SM1221����Ʒ�������ӣ�16��24VDC ���� ��������/����Դ��
��CPU��չ��SM1222����Ʒ�������ӣ�8��24VDC ��� ����Դ��
��ֱ�����ٵ����Z2D1024GN-18S-2GN75K����24VDC�����ٱ�1/75��1800Rpm��0.45Kg.cm��0.69A��GN�������͡�
��š�ǵ����ZGX45RGG DC24V ����24VDC�����ٱ�1/22.5��ֱ��45���ת�٣�2.4����rpm��r/min��0.47A������ֱ�����dz��ּ��ٵ����
��������ף�PB-10X80-S-U����Ʒ���ǵ¿ͣ������ͣ�����10���г�80mm������ʯ����������ͣ�����̶��ܣ�������M5*0.8����ײ�滺�塣
����˷Ŵ�����FS-N11P��:Ʒ�ƻ���ʿ��PNP�����VR���ڣ���/��������Ӧʱ��1ms���£�12-24VDC���磻��ɫLED��Դ���������³���2m���ߴ�15*39*73mm��
�����ͷ��FU-35FZ����Ʒ�ƻ���ʿ����ɢ�����ͣ������Σ�M3������ͼ���о�ͷ0.005 200 32������ǿ������1 m�����ɲ���M3, ������ F-2HAʹ�ù��ֱ�� 0.4(Լ 6 g)
�ص�Դ��EDR-150-24V�����������24VDC���150W/6.2A��
���·����EA9AN2C10A��:2�����10A��C���ѿ����ԡ�
���Ӧ���أ�����ʽ���нӵ�Żɹ��ͣ������ͣ��߳�2m��5-30VDC���磻��ɫLEDָʾ�����÷�ΧG�ͣ�����MD��MK��TR��TC��ACP��ACQ��STM��TWH��M����TWQ��SDA���ף�
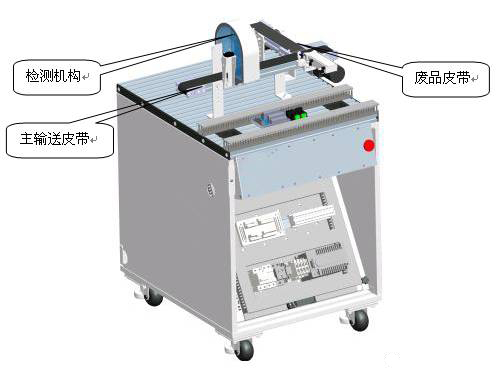
�塢���ּ���վ
5.1 ����վ����
��Ƥ�����У�������һվš�øǺ������ƿ�ӣ�������ƿ����������ʱ���ع鷴�䴫�������ƿ���Ƿ�š�������������ƿ���ڲ������Ƿ����Ҫ��š����������ϸ��ƿ�ӽ���ƿ����ɫ�б����֣�š�ǻ�������ϸ��ƿ�ӱ��ּ�������͵���ƷƤ���ϣ���Ƥ������š����������ϸ��ƿ�ӱ����͵�Ƥ��ĩ�ˣ��ȴ������˰��ˡ�
5.2��Ҫ��������
��˫�����ף�TR-16X125-S���������ͣ�����12���г�125mm������ʯ��ͭ����У�������M5*0.8����ײ�滺�塣
���ѹ�����������ʿ�����������PT1/4����ѹ��ˮʽ��Mpa�̶ȣ���ˮ������15CC
�������ŷ�����ڶ�λ���ȵ�ʽ��˫λ��˫��أ�������M5��������ѹ24VDC��DIN����ʽ�����Ͻ�ѹ����Χ0.15-0.8Mpa�����ʿ�����
��CPU��1214C DCDCDC����Ʒ�������ӣ�14 �㼯�� 24 V ֱ�����������룬10 �㼯�������������2 �㼯��ģ�������룬0 �� 10 V��2 ��������� (PTO)��Ƶ�ʸߴ� 100 kHz��������ȵ������ (PWM)��Ƶ�ʸߴ� 100 kHz��������̫���ӿڣ�TCP/IP native��ISO-on-TCP��������ģ���Ͼ�Ϊ�ɲ�ж�Ķ��ӡ�
��CPU��չ��SM1221����Ʒ�������ӣ�16��24VDC ���� ��������/����Դ��
��CPU��չ��SM1222����Ʒ�������ӣ�8��24VDC ��� ����Դ��
��ֱ�����ٵ����Z2D1024GN-18S-2GN75K����24VDC�����ٱ�1/75��1800Rpm��0.45Kg.cm��0.69A��GN�������͡�
����˷Ŵ�����FS-N11P��:Ʒ�ƻ���ʿ��PNP�����VR���ڣ���/��������Ӧʱ��1ms���£�12-24VDC���磻��ɫLED��Դ���������³���2m���ߴ�15*39*73mm��
�����ͷ��FU-35FZ����Ʒ�ƻ���ʿ����ɢ�����ͣ������Σ�M3������ͼ���о�ͷ0.005 200 32������ǿ������1 m�����ɲ���M3, ������ F-2HAʹ�ù��ֱ�� 0.4(Լ 6 g)
�����ͷ��FU-25����Ʒ�ƻ���ʿ����ɢ�����ͣ������Σ�M6������ͼ0.005 560 100������2 m ���ɲ��У������ڶ�λ M8 (Լ 18 g)
�ص�Դ��EDR-150-24V�����������24VDC���150W/6.2A��
���·����EA9AN2C10A��:2�����10A��C���ѿ����ԡ�
���Ӧ���أ�����ʽ���нӵ�Żɹ��ͣ������ͣ��߳�2m��5-30VDC���磻��ɫLEDָʾ�����÷�ΧG�ͣ�����MD��MK��TR��TC��ACP��ACQ��STM��TWH��M����TWQ��SDA���ף�
������ҵ�����˰�װ����վ
6.1����վ����
AB��������̨�ֱ�洢��װ�еͰ�װ�иǣ���ҵ�����˰�װ����վ������A����̨����װ�е���������̨�ϣ�A����̨��֮����һ���е�λ���ȴ���һվ���ϸ������ƿ��λ������һվ�ϸ�����ƿ��λ��������ҵ�����˽�ƿ��ץȡ������������̨�ϵİ�װ�е��ڣ�����װ�е�4����λ����ƿ�ӣ���ҵ�������Զ���B����̨����ȡ�иǣ����ڰ�װ���ϣ�B����̨��֮����һ���и�λ����֪ͨ��Ʒ�Զ�����վ��⡣

6.2��Ҫ��������
������ˣ�RS05N��������Ʒ�ƣ�Ҳ��ѡ��ABB�������Ʒ�ƻ����ˣ���ˮƽ��չ���� 903mm������� 5kg���������� 37kg�����ظ��ر� 4.8�����ӿ��ƹ���³��� 5m�����ɶ� 6���ɶȣ��ظ���λ���� ��0.03mm��������Χ����ٶȣ�J1�R��180o��300o/s) J2�R+135o~-80o��300o/s) J3�R+118o~-172o��300o/s) J4�R��360o��460o/s) J5�R��145o��460o/s) J6�R��360o��740o/s) ������������� �������أ�J4�R12.3N/m (0.4kg/m2) J5�R12.3N/m (0.4kg/m2) J6�R7.0N/m (0.12kg/m2)
������˿�����������Ʒ�ƣ�Ҳ��ѡ��ABB�������Ʒ�ƻ����ˣ����ߴ磨�����ߣ� 500 x420 x 259mm������ 30kg���ⲿ�ӿڣ�USB����̫����100BASE-TX����RS232C�������Դ 200~240VAC��50~60Hz������/����忨 �����źţ��R32�㣻����źţ��R32�㣨�����߶���̨������/��ģʽ�л���֧�ֶ�̨�������������ṹ ����ȫ��ռ����ȴ��ʽ��������ʽ ȫ�����ŷ�ϵͳ���������� �R8MB ���ɿ����� 7���ⲿ�����ź� ����ֹͣ���ⲿ���ֵȡ�
��ʾ������ ����Ʒ�ƣ�Ҳ��ѡ��ABB�������Ʒ�ƻ����ˣ������пɴ�����TFT��ɫҺ����ʾ������ֹͣ���� ʾ���������� ��ȫ���صȡ�
������������������ѹ12-48VDC�������źŵ�ѹ4-28VDC���������0.3-2.2A����������Ƶ��2-2MHz��3λ���뿪�أ�8�ֵ���ϸ��ѡ��
��CPU��1214C DCDCDC����Ʒ�������ӣ�14 �㼯�� 24 V ֱ�����������룬10 �㼯�������������2 �㼯��ģ�������룬0 �� 10 V��2 ��������� (PTO)��Ƶ�ʸߴ� 100 kHz��������ȵ������ (PWM)��Ƶ�ʸߴ� 100 kHz��������̫���ӿڣ�TCP/IP native��ISO-on-TCP��������ģ���Ͼ�Ϊ�ɲ�ж�Ķ��ӡ�
��CPU��չ��SM1221����Ʒ�������ӣ�16��24VDC ���� ��������/����Դ��
��CPU��չ��SM1222����Ʒ�������ӣ�8��24VDC ��� ����Դ��
�ص�Դ��EDR-150-24V�����������24VDC���150W/6.2A��
���·����EA9AN2C10A��:2�����10A��C���ѿ����ԡ�
���Ӧ���أ�����ʽ���нӵ�Żɹ��ͣ������ͣ��߳�2m��5-30VDC���磻��ɫLEDָʾ�����÷�ΧG�ͣ�����MD��MK��TR��TC��ACP��ACQ��STM��TWH��M����TWQ��SDA���ף�
���ѹ�����������ʿ�����������PT1/4����ѹ��ˮʽ��Mpa�̶ȣ���ˮ������15CC
�������ŷ�����ڶ�λ���ȵ�ʽ��˫λ��˫��أ�������M5��������ѹ24VDC��DIN����ʽ�����Ͻ�ѹ����Χ0.15-0.8Mpa�����ʿ�����
�ߡ���Ʒ�Զ�����վ
7.1����վ����
��һ����������ֿ��2���ŷ��Ѷ������ɣ�����ҵ�����˹���վ��ɰ�װ�������źŰѻ����˹���վ����̨�ϵİ�װ������ȡ������Ȼ��Ҫ�����η���ִ���Ӧ��λ��2��3�IJֿ�ÿ����λ����װһ�����������Ѷ����ˮƽ��Ϊ���ֶܷ��̻�������ֱ����Ϊ����˿����������������������V90�����ŷ�������и߾��ȿ��ơ�

7.2��Ҫ��������
��V90�ŷ����ƣ�Ʒ�������ӣ�����ȫ������ģʽ���ⲿ����λ�ÿ��� �ڲ��趨ֵλ�ÿ��� �ٶȿ��� Ť�ؿ��ƣ����ɱ�բ�̵�����1MHz�����������룬20λ�ֱ��ʾ���ֵ����������ͨ��SD���������Ƶȡ�
��V90�ŷ������Ʒ�������ӣ���ٶ�2000rpm,�Ť��1.27NM�����Ա�����20λ�ֱ棬�����ȼ�IP65 ����ȴ��
����շ�������ֱ������ͣ�����������������ֱ����0.5�������ն�+88kPa��SUP�ӿ�Rc1/8��VAC�ӿ�Rc1/8��EXH�ӿ�Rc1/8
�����̣���ֱ��տڽӹܣ��������壻��10ƽ�����̣��������ӹܷ�ʽ�����ƣ�����ֱ��M5*0.8
��CPU��1214C DCDCDC����Ʒ�������ӣ�14 �㼯�� 24 V ֱ�����������룬10 �㼯�������������2 �㼯��ģ�������룬0 �� 10 V��2 ��������� (PTO)��Ƶ�ʸߴ� 100 kHz��������ȵ������ (PWM)��Ƶ�ʸߴ� 100 kHz��������̫���ӿڣ�TCP/IP native��ISO-on-TCP��������ģ���Ͼ�Ϊ�ɲ�ж�Ķ��ӡ�
��CPU��չ��SM1221����Ʒ�������ӣ�16��24VDC ���� ��������/����Դ��
��CPU��չ��SM1222����Ʒ�������ӣ�8��24VDC ��� ����Դ��
�ص�Դ��EDR-150-24V�����������24VDC���150W/6.2A��
���·����EA9AN2C10A��:2�����10A��C���ѿ����ԡ�
���Ӧ���أ�����ʽ���нӵ�Żɹ��ͣ������ͣ��߳�2m��5-30VDC���磻��ɫLEDָʾ�����÷�ΧG�ͣ�����MD��MK��TR��TC��ACP��ACQ��STM��TWH��M����TWQ��SDA���ף�
���ѹ�����������ʿ�����������PT1/4����ѹ��ˮʽ��Mpa�̶ȣ���ˮ������15CC
�������ŷ�����ڶ�λ���ȵ�ʽ��˫λ��˫��أ�������M5��������ѹ24VDC��DIN����ʽ�����Ͻ�ѹ����Χ0.15-0.8Mpa�����ʿ�����
�ˡ��˻�����
8.1�˻��������
7�������������װ�ڳ�Ʒ��ֵ�Ԫ�������һ���Զ����������վ������PLC����ͨѶ����ʾ�豸����Ҫ�IJ������ã��豸��ͣ����ʾ��վ���IO�źţ�Ӳ��IP�ȡ�

�š�����
9.1��������
�����;�������ѹ����
����ѹ��220V AC 50Hz
�������2.4A
���ʣ�545W
���ݻ�������70L/min
������ѹ����0.47Mpa
������ѹ��:0.77Mpa
�������ݻ���32L
��������55-62dB?
��������29kg
ʮ��ʵѵ��Ŀ
ʵѵ��Ŀ |
ʵѵ���� |
����Ŀ�� |
| ��еװ��ʵѵ��Ŀ |
����Ƥ��װ��ѵ��?
ѭ��ѡ�ϻ���װ��ѵ��?
�Ӹǻ���װ��ѵ��?
š�ǻ���װ��ѵ��?
������װ��ѵ�� |
�Ի�е����Ƥ��������ת��˫����ת�Ľṹ��ʶ��װ������?
��������ϼӸ�š�ǻ����Ľṹ��ʶ��װ������?
�Դ�������ϼ������Ľṹ��ʶ��װ������ |
����װ��ʵѵ��Ŀ |
����Ƥ����������ѵ��?
ѭ��ѡ�ϻ�����������ѵ��?
�Ӹǻ�����������ѵ��?
š�ǻ�����������ѵ��?
��������������ѵ�� |
����ͼֽ����ʶ���ɰ�ͼ����?
�������߹��ߵ���ʶ���˽⼰ʹ��?
�����������ȵ������Ľ��߷���?
���ֵ���Ľ�����ʶע������ |
PLC���ʵѵ��Ŀ |
��װ���Ϲ���վ�ı�̵���?
�Ӹ�š�ǹ���վ�ı�̵���?
���ּ���վ�ı�̵���?
��ҵ�����˰�װ����վ�ı�̵���?
��Ʒ�Զ�����վ�ı�̵���?
��װ�Զ��������ߵı�̵��� |
��ʹ�ò�;�������½����༭�Ȼ�������?
��ʹ�ò�;���������á���̬��ͨ�Ų���?
��Ϥ��������������������PLC�е�Ӧ��?
��Ϥ���������������PLC�е�Ӧ��?
��ʹ��������PLC���Ʋ������?
��ʹ��������PLC�����ŷ����?
��ʹ��������PLC���ƻ�����?
��ʹ��������PLC�봥������ͨ�� |
�����˻������� |
������ȫ���ػ����ֶ�����?
һ������ų�?
�����������������������߿��Զ���?
���������л����˷�Ӳ�����µı���ͣ������ٻָ�����?
�ֶ����Ի����˳����ij����л����˵��λ��?
���ݻָ��ѱ�õĻ����˳��� |
�ܽ��л����˿��ؼ��ֶ��������Զ�����?
���ų�һ���Թ���?
�ܽ��л������Զ�����?
���ֶ����Ի����˳����ij���?
�ᱸ�ݡ��ָ��ѱ�õĻ����˳���?
���ð�ȫ�������� |
�����˱�� |
������ȫ���ػ����ֶ�?
һ������ų�?
�����������������������߿��Զ���?
���������л����˷�Ӳ�����µı���ͣ������ٻָ�����?
�������ļ����Ի�����Ӧ�ó���?
���ݡ���ԭ�����˳��� |
���л����˿��ؼ��ֶ�����?
���ų�һ���Թ���?
�ܽ��л������Զ�����?
������д�����˳����Ի�����?
���ֶ����Ի����˳����ij���?
�ᱸ�ݡ��ָ��ѱ�õĻ����˳���?
���ð�ȫ�������� |
�����˵���ά�� |
�ų���ͨ���ָ�����״̬?
ȷ���������ͣ��������?
���ݡ���ԭ�����˳�������ϵͳ�ļ�?
������ϵͳ�������á��ŷ��������á������� I/O ���ü�Ӧ��?
��ȫ���� |
�ܹ��ų���ͨ��������?
�ܹ�ȷ���������ͣ������й������?
�ᱸ�ݡ���ԭ�����˳�������ϵͳ�ļ�?
���������û�����ϵͳ���ܡ������� I/O ���ü�Ӧ��?
���ð�ȫ�������� |
�����˻�еά�� |
������ȫ���ػ����ֶ�?
��е���������ϼ��ų�?
�����������������������߿��Զ���?
���������˻�е����?
�����˵���?
�����˻�е���嶨��ά������?
��ȫ���� |
�ܽ��л����˿��ؼ��ֶ�����?
����Ϻ��ų���е�������?
�ܹ����������˻�е����?
�����������?
��Ի����˻�е���嶨�ڽ���ά���ͱ���?
���ð�ȫ�������� |
ʮһ����ϸ�����嵥
| ��� |
���� |
����ͺ�/�������� |
���� |
Ʒ�� |
��ע |
����һ�廯�ۺ�ʵѵ�����豸�����嵥 |
1 |
��װ���Ϲ���վ |
������Ƥ������Ƥ�����ּ��������ȡ��������� |
1�� |
���� |
���� |
2 |
�Ӹ�š�ǹ���վ |
�ɼӸǻ�����š�ǻ�������� |
1�� |
���� |
���� |
3 |
���ּ���վ |
����Ƥ�������������ּ��������� |
1�� |
���� |
���� |
4 |
��ҵ�����˰�װ����վ |
�����Ṥҵ�����ˡ�����̨���е�����̨���и�����̨����� |
1�� |
���� |
���� |
5 |
��Ʒ�Զ�����վ |
�ɶѶ����6λ��������ֿ⡢��ȡ��������� |
1�� |
���� |
���� |
6 |
�˻����� |
? |
1�� |
���� |
���� |
7 |
����ϵͳ |
? |
1�� |
���� |
���� |
8 |
�����Ƴ� |
�ߴ�Լ��580mm��580mm��1000mm ����ҵ���ͲĽṹ�������� |
2�� |
���� |
���� |
9 |
װ���� |
? |
2�� |
���� |
���� |
10 |
ѧ���� |
�����֧�ܣ�Һѹ���������Ƶ��У�ABS��ɫ���� |
4�� |
���� |
���� |
11 |
�ܿص�Դ |
? |
1�� |
���� |
���� |
12 |
��Ʒ����� |
������PLC����ߡ�������USB�����ߡ�������USB�����ߡ�485ͨѶ�ߡ�����ѹ�������Ų��������Ͽ顢�豸ʹ��˵���顢��װ��˿��ĸ�����ߵ� |
1�� |
���� |
���� |
����һ�廯�ۺ�ʵѵ�����豸ѡ���嵥 |
9 |
������ |
ʵѵ������������ |
���� |
? |
ѡ�� |

|
